「屋内位置測位」に革命を起こす第三の矢 ~磁気センサ方式
みなさんこんにちは。テクノシェルパ技術コンサルタントの赤谷です。
2020年12月現在、コロナ第3波が到来しており、再び密を避ける対策の強化を求められるなど、すっかり世界が様変わりした感があります。このような中、人との接触を回避できる自動化技術として物流倉庫においてもロボットを活用するなど、自動化のニーズはますます高まりつつあります。
当社はその自動化の一翼を担う「屋内位置測位」について、オリジナル技術を有しており、これまでブログやYouTubeでもご紹介してきました。
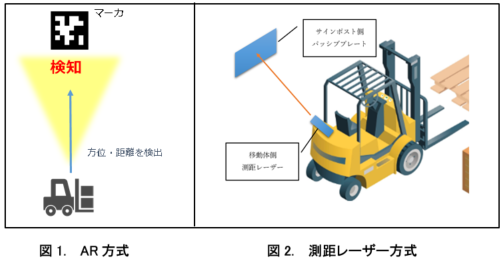
これらのブログやYouTubeでは、カメラによるAR(拡張現実)技術を活用した方式と測距レーザーを活用した方式について、ご紹介しております。
今回はこれら2つの方式に加え、第三の矢として磁気センサ方式についてご紹介いたします。
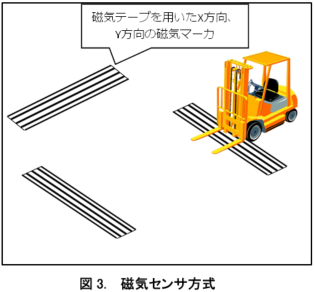
磁気センサについてはAGV(無人搬送車)などで活用されておりますが、この場合は走行ルート上に貼り付けられた磁気テープを、AGVに搭載した磁気センサで検出することによって、走行ルートを把握し自動走行を実現しております。
一方、屋内倉庫などで稼働するフォークリフトなどは、決まったルートを通るのではなく倉庫内を自由に走り回るため、磁気センサで位置測位するためには工夫が必要です。
そこで、当社は磁気テープをサインポスト(絶対位置を定義したポイント)として活用する方法を発案しました。
フォークリフトが図4のように磁気テープの上を通過すると磁気センサからは磁気テープのパターンに応じた信号(ID情報)が出力されます。
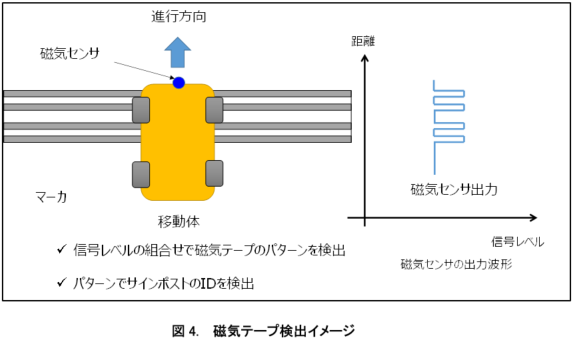
このID情報とサインポストの絶対位置情報をメモリ等で関連付けておくことによって、移動体の位置測位が可能となります。
サインポストが無い区間は、車速パルスやジャイロセンサからどちらの方向にどれだけ移動したかを検出することによって、移動体の現在位置を算出します。(これを相対位置測位と呼びます。)
磁気センサ方式は、AR方式や測距レーザー方式のようにマーカやプレートを設置することが困難な場合などに有効な手法となります。(倉庫に柱がなく荷物を直置きしているような場合)
このようにフォークリフトやAGVなどの屋内移動体が稼働する環境によって、位置測位に必要な技術は異なります。
当社はお客様の様々なニーズにお応えするため、屋内位置測位の手法として3本の矢(1.AR方式、2.測距レーザー方式、3.磁気センサ方式)をご用意しており、お客様にとって最適な手法を技術コンサルティングにてご提案させていただくことができます。
【関連リンク】
- 本日、プレスリリース! ~AR活用による工事不要、低コストのAGV屋内自動走行~
- 本日、日刊工業新聞に当社の測位技術の紹介記事が載りました ~屋内自動走行のための高精度測位技術~
- 屋内で数cm以内の位置精度を実現! ~電波を使わない、新しい位置測位のカタチ~(特許出願中)
- 物流を担う人手不足の解決方法は「自動化」。ドローンによる輸送実験も進展中
- テレビ番組にも登場した、自動運転・自動搬送に不可欠の「自律航法」技術のデモ動画です
- RTK-GNSS受信機による位置検出精度は?
- テクノシェルパが提供する位置情報検出技術とは
- GPSの位置精度をご存知ですか?
- 「自動運転」、「IoT」の盛り上がりが嬉しい WTI赤谷
テクノシェルパ・メールマガジンの配信(無料)
| テクノシェルパの技術コンサルや技術者教育に関わる情報などをお届けしているブログ記事は、メールマガジンでも購読できます。ブログのサンプル記事はこちら
テクノシェルパメールマガジンの登録・メールアドレス変更・配信停止はこちら |

